
GECAM卫星具有在轨实时触发和定位功能,并将触发定位等信息实时发送给卫星平台,通过北斗导航系统的短报文准实时下传触发定位等信息。
在轨触发
统计一定触发时标、相位、能道范围内的某个GRD探测器计数S,同时获取当前当前触发时标、算法能道范围内的本底估计值Bg,则根据当前参数计算得到的触发事件的显著性为:
有效载荷在轨期间将实时判断判断当前时间往前一定时标范围、能道范围内各探测器显著性是否大于触发参数表中的显著性阈值σ(可调),如果超过阈值的探测器个数大于等于3个(可调),则判断为触发,进入触发定位
触发定位
借鉴Fermi/GBM等卫星采用的传统定位方法,即预设若干能谱形状(设计为3种:Band软、中、硬谱)的定位模板,根据实测的各GRD探测器接收到的触发事件的计数,跟这些预设定位模板进行匹配,根据拟合优度计算最可几的定位及误差范围。并且根据与最佳定位时标中间时刻最相邻整秒时间的卫星姿态四元数进行坐标转换,将有效载荷坐标系下的最优定位结果(θ,φ)转换到J2000坐标系(RA, DEC)。之后进行触发分类判断
定位模板包括软中硬3种固定能谱,每个谱是3072×25的二维数组,代表3072种角度下归一后25个GRD探测器的计数。该定位模板可允许在轨更新,以适应在轨期间的载荷性能变化。
定位结束后,找到最佳定位谱中的卡方次佳,根据卡方最佳和次佳差值是否大于等于1,计算定位误差,具体如下图所示。
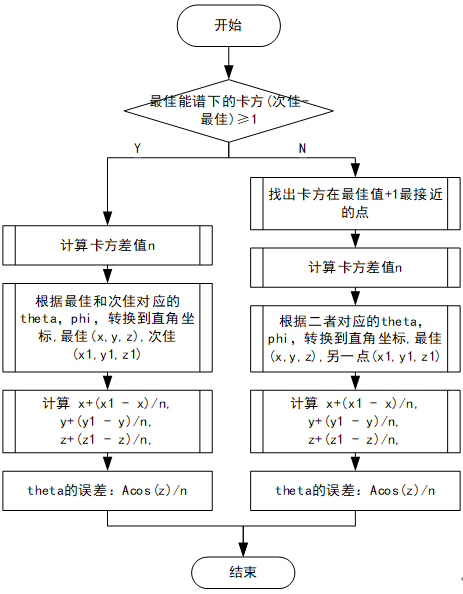
图:定位误差计算流程
触发分类
根据CPD和GRD探测器净计数之比以及GRD硬度比判断是否是粒子事件,然后根据太阳位置信息、定位结果、地心角、GRD硬度比判断是否是太阳耀发事件,随后根据定位结果、已知源数据表、地心角判断是否为已知源事件。对于判断为粒子事件、太阳耀发、已知源的触发事件,标记为二类触发并将定位信息、触发分类编号等数据存储为工程数据,否则判断为一类触发事件,将定位信息写入短报文和工程数据,以尽快通过北斗系统下传到地面。
更详细内容,可参见“GECAM在轨触发定位软件”(中国科学,投稿中)